Autonomer Roboter mit Linux als Betriebssystem
Der Roboter Pioneer II AT ist mit Kamera, Laserscanner, Ultraschallsensoren und Greifer ausgestattet. Weitere Ausstattungen wie GPS oder Stereokamera sind ebenfalls möglich. Die Steuerung der Sensoren und Aktoren wird von einem integrierten, auf dem Siemens C166 basierenden, Mikrocontroler und einem Laptop übernommen. 
Bild 1: Pioneer II AT Betriebsmodi: Der Roboter kann autonom agieren oder von einem weiteren Rechner aus manuell gesteuert werden. Der Pioneer II AT erkennt Wände und Türen und nutzt diese zur Wegplanung. Weiterhin kann er auf Grund seiner guten Rechenleistung auch eine Objekterkennung auf der Basis von Kammerabildern durchführen. Das ermöglicht ihm, erkannte Objekte anzufahren, sie mit dem Greifer aufzuheben und zu transportieren. Programmierung / Software:Die Programmierung des Roboters kann mittels C/C++ erfolgen. Zusätzlich können auch Scripte und Befehle in COLBERT, einer Scriptsprache zur Steuerung des Roboters, ausgeführt werden. In der Entwicklungsumgebung SAPHIRA werden komfortable Funktionen zur Steuerung des Roboters zur Verfügung gestellt. Programme können getestet werden und das Verhalten des Roboters kann überwacht werden. 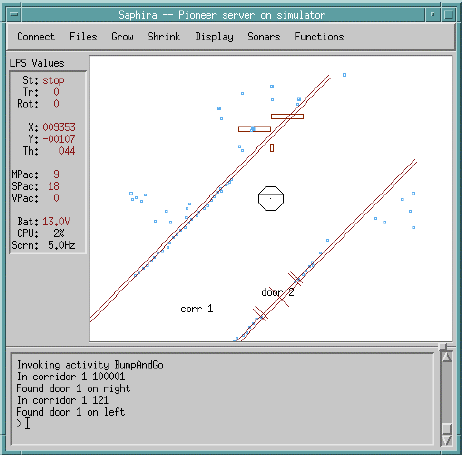
Bild 2: SAPHIRA |